本笔记尚未完成!
上次出 urdf 的笔记:从XML开始学习编写URDF
进一步补充,要求多个参数的 xacro 只给少几个参数会如何
答:没问题,继续执行,没给参数的就是0
todo:进一步补充
<safety_controller k_position="100" k_velocity="0.1"
soft_lower_limit="${pitch_lower_limit+threshold}"
soft_upper_limit="${pitch_upper_limit-threshold}"/>
怎么用
$(arg var):专门用于获取外部传入的变量(Launch 文件或命令行参数)。${var}:用于 Python 表达式计算、数学运算或获取内部定义的常量(Property)
区分xacro:property 和xacro:arg
排错:关注标签是否闭合,关注参数名称是否完全对应
¶ 笔记 :给实车出 urdf
以 legged_balance 为例,队内车 urdf 文件一般由以下结构组成 :
- legged_balance.urdf.xacro 核心文件,按需(参数决定)包含底盘、云台、发射器等部分
- chassis.urdf.xacro 底盘文件,定义 base_link ,包含并实例化 leg,将他们按照相应的结构连接。并联腿平衡步兵在这里通过 gazebo 标签将前腿和后腿相连从而绕开 urdf 不支持闭链描述的问题。比较特殊的是:平衡步兵轮子的定义是在 chassis 文件中
- leg.urdf.xacro 腿文件,如果是全向轮或麦轮这里则是类似 omni.urdf.xacro 等定义轮子的文件。本文件定义连杆结构的四条腿(四个 link:前第一、前第二、后第一、后第二)和相应的 joint
- leg.transmission.urdf.xacro 腿文件的传动,为腿文件里定义的 joint 定义 transmission 属性,包含控制器类型(EffortJointInterface)、电机名称、减速比、offset 等参数
- gimbal.urdf.xacro 云台文件,重点是 yaw 和 pitch 两个 link,相应的 joint 将 pitch 连上 yaw,将 yaw 连上 base_link
- gimbal.transmission.urdf.xacro 云台结构的传动,包含 yaw 和 pitch 的 joint 的传动
- shooter.urdf.xacro 发射结构,调用并实例化 common 里写好的摩擦轮,同时自己定义一个 trigger(拨弹盘)
- shooter.transmission.urdf.xacro 发射结构的传动,包含两个摩擦轮的 joint 传动和拨弹盘的 joint 传动
可以发现队内车的构成相当模块化,以底盘作为 base_link,连接起不同的组件。transmission 的定义独立于 link 和 joint 方便修改 offset 等参数
考虑到上层的文件基本都是对下层文件的实例化,下面的介绍从底层文件开始
¶ leg.urdf.xacro
本文件通过宏规定了腿的各项参数。对于并联腿,一侧有四个link和四个joint:
- front first leg
- front second leg
- back first leg
- back second leg
考虑到前后完全一致,这里定义一组first和second即可完整全部腿的定义。在实际编写时,将全部存在差异的参数通过参数提供:
<joint name="${prefix}_second_leg_joint" type="continuous">
<axis xyz="0 1 0"/>
<origin xyz="${leg_x_offset} ${leg_y_offset} ${leg_z_offset}" rpy="0 ${pitch_offset} 0"/>
<parent link="${connected_to}"/>
<child link="${prefix}_second_leg"/>
<dynamics damping="0.0" friction="0.001"/>
</joint>
¶ leg.transmission.xacro
本文件规定了一侧全部腿,共四个joint的传动。再非仿真的情况,其规定了特殊的五连杆传动类型:
<xacro:unless value="${use_simulation}">
<transmission name="${prefix}_leg_trans">
<type>transmission_interface/FiveLinkTransmission</type>
<actuator name="${prefix}_back_leg_joint_motor">
<mechanicalReduction>${mechanical_reduction}</mechanicalReduction>
<offset>${back_offset}</offset>
<l1>${l1}</l1>
<l2>${l2}</l2>
<l5>${l5}</l5>
</actuator>
<actuator name="${prefix}_front_leg_joint_motor">
<mechanicalReduction>${mechanical_reduction}</mechanicalReduction>
<offset>${front_offset}</offset>
<l1>${l1}</l1>
<l2>${l2}</l2>
<l5>${l5}</l5>
</actuator>
<joint name="${prefix}_back_first_leg_joint">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<joint name="${prefix}_front_first_leg_joint">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<joint name="${prefix}_back_second_leg_joint">
<pitch_offset>-${second_leg_pitch_offset}</pitch_offset>
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<joint name="${prefix}_front_second_leg_joint">
<pitch_offset>${second_leg_pitch_offset}</pitch_offset>
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
</transmission>
</xacro:unless>
¶ gimbal.urdf.xacro
本文件直接规定了云台上的 yaw,pitch link以及相对应的joint。还特别规定了几个没有物理属性的link作为特别的参考系供视觉使用(urdf规定了坐标变换),如:
<link name="flank_frame"/>
<joint name="flank_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 ${pi/2}"/>
<parent link="yaw"/>
<child link="flank_frame"/>
</joint>
和
<link name="yaw_reverse_frame"/>
<joint name="yaw_reverse_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 ${pi}"/>
<parent link="yaw"/>
<child link="yaw_reverse_frame"/>
</joint>
¶ gimbal.transimission.urdf.xacro
规定云台各joint的传动
¶ shooter.urdf.xacro
定义摩擦轮link和拨弹盘(trigger)link以及对应的joint。前者使用队内现成的实现:
<xacro:include filename="$(find rm_description)/urdf/common/friction.urdf.xacro"/>
<xacro:property name="wheel_offset_x" value="0.041"/>
<xacro:property name="wheel_offset_y" value="0.036"/>
<xacro:property name="wheel_offset_z" value="0.0"/>
<xacro:friction_wheel prefixs="left" connected_to="pitch"
wheel_x_offset="${wheel_offset_x}" wheel_y_offset="${wheel_offset_y}"
wheel_z_offset="${wheel_offset_z}"/>
<xacro:friction_wheel prefixs="right" connected_to="pitch"
wheel_x_offset="${wheel_offset_x}" wheel_y_offset="${-wheel_offset_y}"
wheel_z_offset="${wheel_offset_z}"/>
¶ shooter.transmission.urdf.xacro
规定摩擦轮和拨弹盘joint对应的传动
¶ legged_balance.urdf.xacro
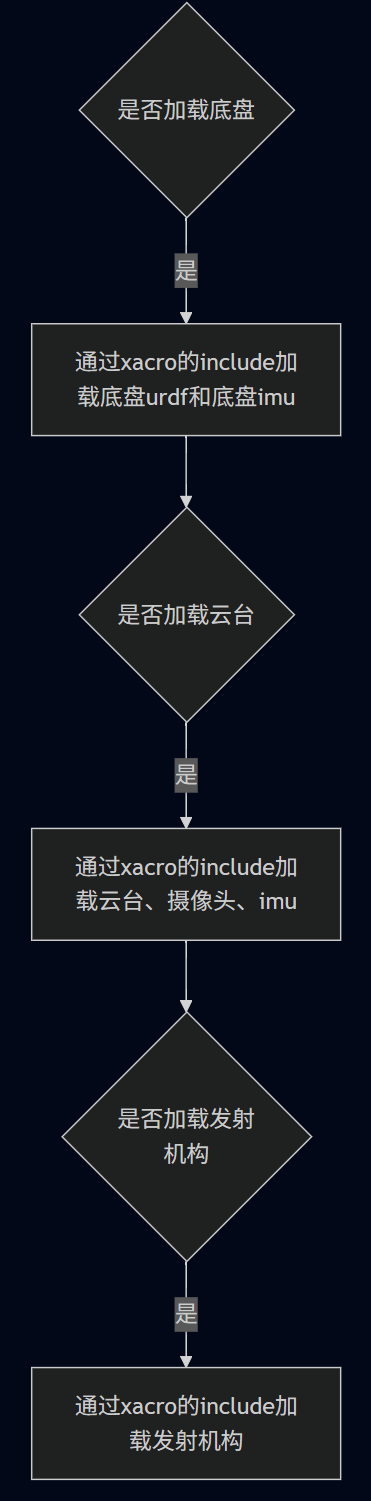
这个文件除了加载云台、底盘、发射机构等结构还将 imu 和 camera 附加上了车子。底盘有一个 imu,云台有一个 imu 和一个 camera
我们会发现如下代码包含两个 xacro:camera_optical_frame ,是视觉组用的摄像机的两组参数
<xacro:camera_optical_frame xyz="0.06059775176285364 0.000087 0.09256327160978175"
rpy="-1.6441064 0 -1.5807963"
frame_id="$(arg camera_optical_frame)"
parent="pitch"
camera_sim="false"/>
<xacro:camera_optical_frame xyz="0.06059775176285364 0.000087 0.09256327160978175"
rpy="-1.6501064 0 -1.53057963"
frame_id="$(arg camera2_optical_frame)"
parent="pitch"
camera_sim="false"/>
本文件还需要规定仿真时采用的 RobotHW
<xacro:if value="$(arg use_simulation)">
<gazebo>
<plugin name="rm_ros_control" filename="librm_robot_hw_sim.so">
<robotNamespace>/</robotNamespace>
<robotSimType>rm_gazebo/RmRobotHWSim</robotSimType>
</plugin>
</gazebo>
</xacro:if>
需要加载队内的机器人仿真类型,通过 use_simulation 参数判断是否加载仿真插件。
¶ chassis.urdf.xacro
本文件将两侧的leg实例化,同时通过gazebo标签处理urdf不支持闭链结构的问题:
<gazebo>
<joint name="right_connect_joint" type="revolute">
<parent>right_front_second_leg</parent>
<child>right_back_second_leg</child>
<axis>
<xyz>0 1 0</xyz>
</axis>
<pose>0 0 -0.25 0 0 0</pose>
</joint>
</gazebo>
注意其中的pose
pose描述了子link坐标系到joint坐标系的变换关系,那pose如何判断父坐标系和joint坐标系的关系呢?答案是在之前的模型建立中,我们就有父link和子link的坐标变换关系了,在世界坐标系中二者的位置已经确定,进而我们可以确定joint在世界坐标系的位置,该位置也将和父亲link相连