¶ 1. 准备
- 依照连车流程中的内容做到手跑控制器步骤
- 启动
gimbal_calibration_controller,听到校准声后关闭(对于绝对式编码器的电机,这一步是非必须的) - 将车的 pitch 轴扶正,启动
gimbal_controller - 启动 rqt -> Topics -> Message Publisher 插件,话题设置为
/controllers/gimbal_controller/command,rate设置为200
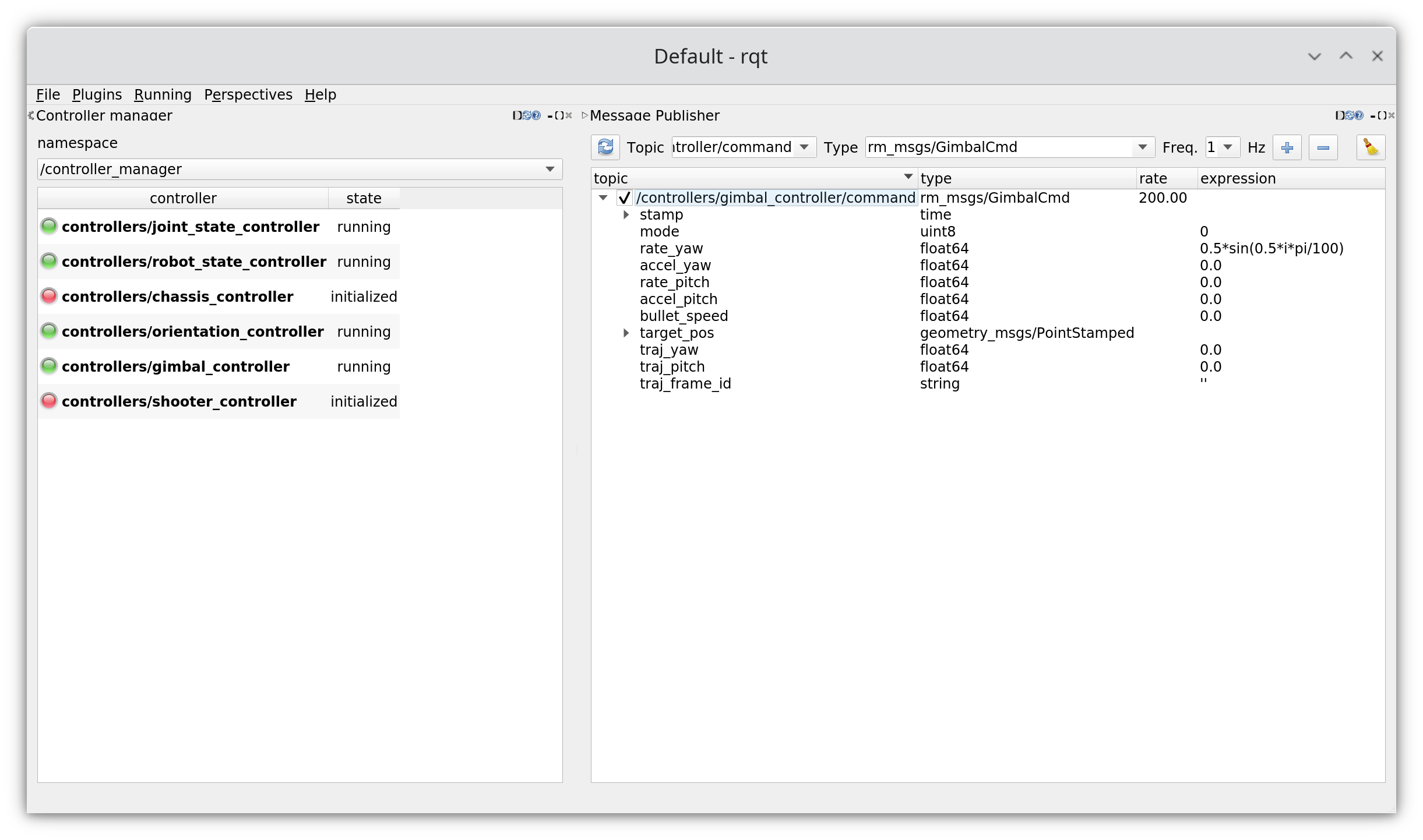
- 如果要调yaw轴云台pid,则将话题消息中
rate_yaw设置为0.5*sin(0.5*i*pi/100)。这会让云台yaw轴开始正弦运动(左右来回摆动)。调pitch轴pid同理,设置话题消息中的rate_pitch即可 - 启动
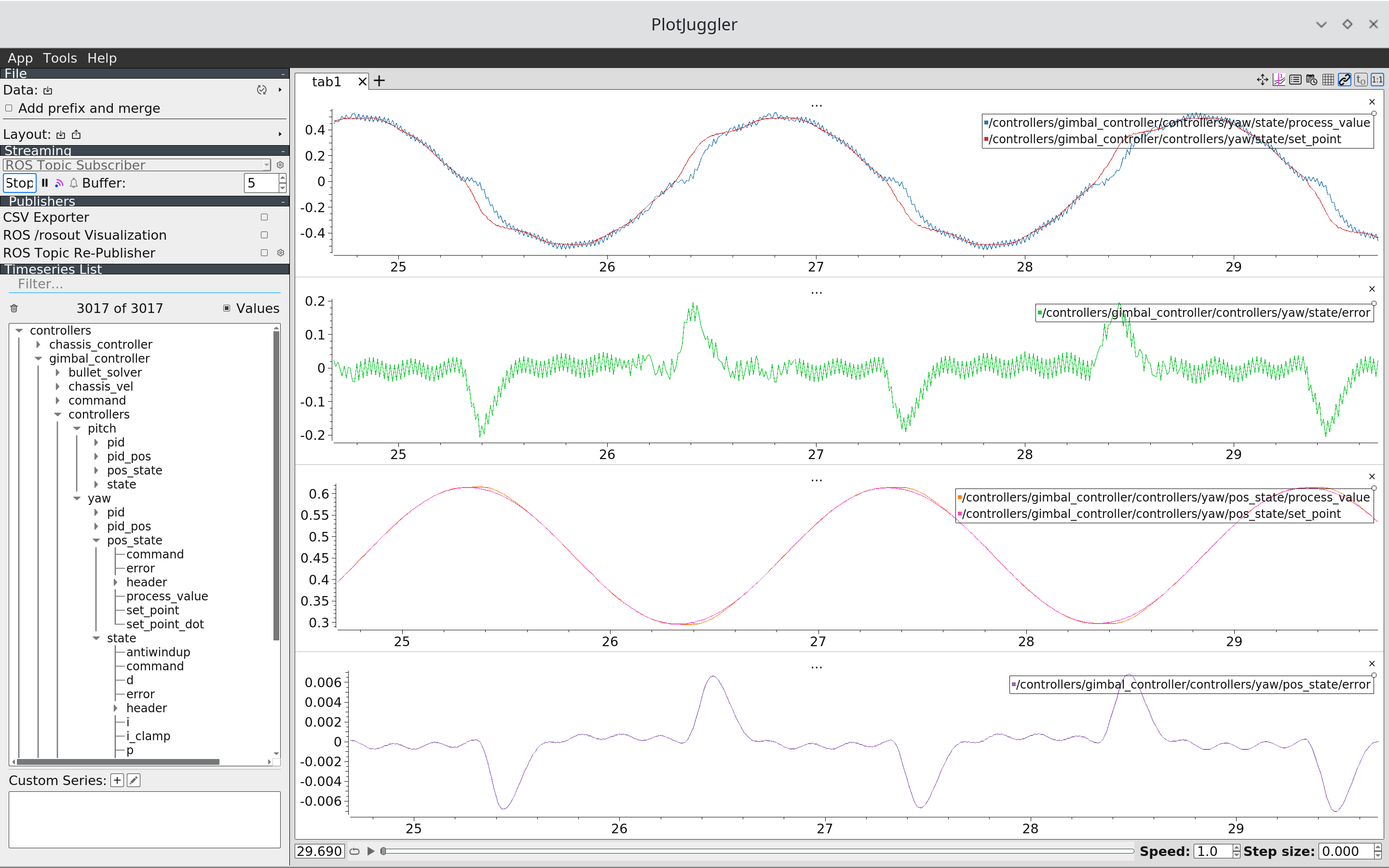
plotjuggler拉曲线。具体位置可参:
/controllers/gimbal_controller/controller/yaw
/controllers/gimbal_controller/controller/pitch
此处的pos_state和state分别代表位置环状态和速度环状态(有pos词缀表明是位置环,没有则是速度环)。展开后:process_value代表实际值set_point代表目标值error即误差
调试标准是pid_pos的误差在0.006以内
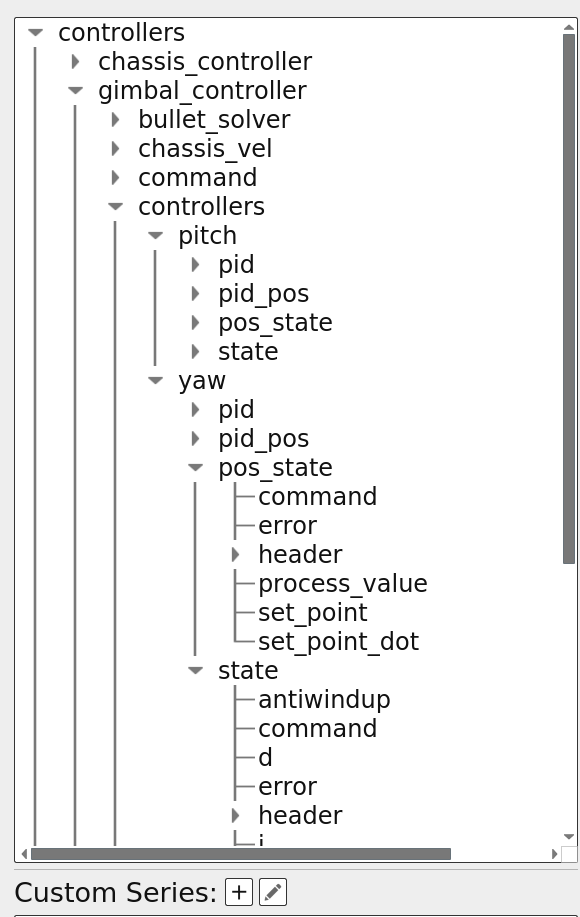
可以将上述数据按下图所示拉取方便下一步的调试
¶ 2. 调 PID
云台采用串级 PID 控制
- 位置环实际是在对期望速度曲线进行规划(就是在规划电机从位置 a 移动到位置 b 的速度曲线,一般只需要 kp)
- 位置环的输出作为速度环的输入,也就是速度环的期望
- 真正输出电机力矩指令的是速度环(速度环一般使用 pi 控制,让速度曲线跟踪误差尽量小)
故先调速度环,再调位置环
¶ 2.1 调速度环
- kp 调到不抖,再调i;
- 给积分的时候注意限幅不能太大,ki 也不能太大;要看输入阶跃时,最后云台会不会震荡,要看跟随过程中的表现,以及起步时误差收敛速度;积分项的效果是限幅跟 ki 一起决定的,因为积分项是误差积分的值乘 ki,然后输出为力矩指令;
- 积分项要满足跟踪过程中误差尽量小(开始就看效果大概给个限幅跟ki);
- 一般输入阶跃云台最后会高频震荡,应该是 ki 太大,因为输入阶跃时积分的值一般会直接拉满,阶跃误差很大,一下子就会积满。其最终应该是一个定值即限幅值,ki 太大就会在期望值附近高频震荡,如果给小 ki 后还是会摇头的震荡,那就要把限幅给小;
- 重复 3 和 4,最后应该就可以调出一个不错的积分环节。
¶ 2.2 调位置环
- 一般只需要给kp,位置曲线响应尽量快不超调即可
- 对位置环输入是阶跃信号,这种情况可以考虑对期望安排一个过渡过程,即将阶跃的物理不可实现的转换成连续的期望位置曲线,此时每个控制周期的位置误差都会很小,位置环开环增益可以再给大而不会超调。大开环增益对于减小跟踪误差也有帮助
- 对于过渡过程可以使用三次样条五次样条规划,或者使用跟踪微分器(TD)。跟踪微分器可以同时给出规划出的期望位置曲线的微分曲线,可以使用这个微分曲线作为速度环前馈
前馈简单理解就是:
假设以 sin 曲线为期望,反馈是位置环产生误差后,位置环计算出速度指令输入到速度环,再让电机转动,这是有滞后的。
前馈是对期望位置曲线微分,得到期望速度曲线后(或者其他方法得到期望速度曲线),直接将这个期望速度输入到速度环,作为速度环期望,这是开环控制,没有反馈环节,故响应更快。误差来自速度环的跟随误差
由于前馈是开环控制,响应快而稳定性差。而反馈控制是闭环控制,稳定性好,所以一般会将前馈控制与反馈控制配合一起使用。
¶ 3. 调云台 pitch 重力补偿
期望的效果是,在启动云台控制器但未发送控制指令时,云台在水平及上下一定角度时能只靠重力补偿定住
需要修改的文件位置:/src/rm_config/config/rm_controllers/<车名>.yaml
gimbal_controller 下的 feedforward 项
feedforward:
gravity: 6.725
enable_gravity_compensation: false
mass_origin: [ 0.0185,0.0,0.01 ]
¶ 3.1 新法调试
- 在启动云台控制器后,将速度环与位置环的 PID 值全部置 0,用手将云台pitch轴摆到水平角度附近。松开手后查看云台状态:
需要验证上述内容的 “将速度环与位置环的 PID 值全部置 0”
- 云台往下低:说明给的补偿不够,适当调大 gravity 或将 mass_origin 向枪管指向方向调整
- 云台往上抬:说明给的补偿过大,适当调小 gravity 或将 mass_origin 向枪管指向方向的反方向调整
¶ 3.2 古法调试
- 移动 pitch,找到重力矩最大的 pitch 角度。(做位置闭环,静止时的电机输出扭矩即为重力矩)记录此时 pitch 角度 ,和电机输出扭矩 。
- mass_origin 是 pitch 质心在 pitch 坐标系的位置,依次为 。满足即可。具体数值不重要。
- 由 ,根据第一步记录的 ,和第二步设的 和 ,计算 。将 填入 gravity。
enable_gravity_compensation设为false,这个重力补偿指的是机械上的那个重力补偿。只有英雄才有- 细调。根据补偿后的效果,适当调整
gravity,直到效果较好