请注意!本文的内容尚未经过验证。若你参照文章完成了调试,或是发现了文章存在的问题,请修正并编辑本提醒。
¶ 1. 准备
- 依照连车流程中的内容做到手跑控制器。
- 启动 plotjuggler 拉曲线。具体位置可参:
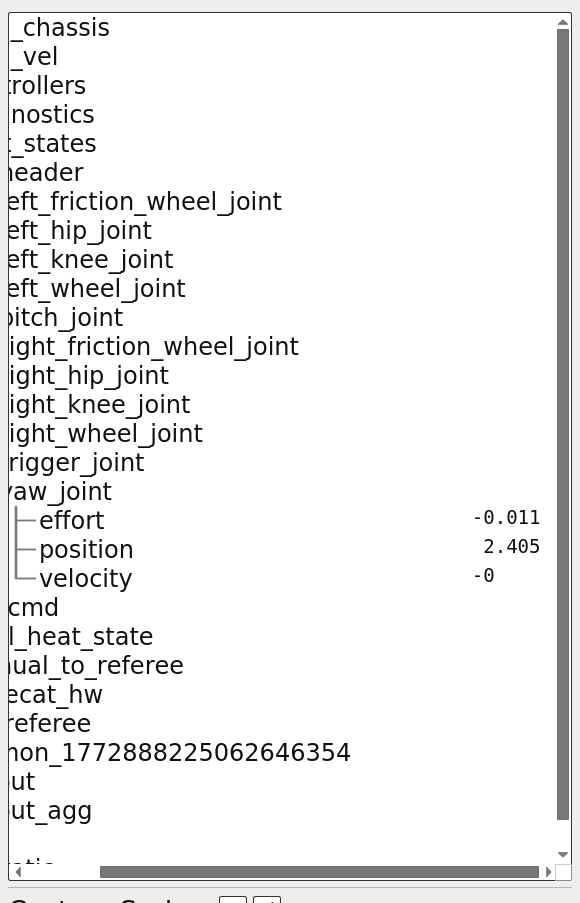
/joint_states/yaw_joint/position - 把车的云台 yaw 摆准到面向正前方(一般电池那边是正前),稳定后读取 plotjuggler 中
position的值。以下图为例,值为2.405
¶ 2. 调整流程
要调整的位置:
rm_description/urdf/<要调节的兵种>/gimbal.transmission.urdf.xacro
下图中的 offset 项
<transmission name="trans_yaw_joint">
<type>transmission_interface/SimpleTransmission</type>
<actuator name="yaw_joint_motor">
<mechanicalReduction>-1</mechanicalReduction>
</actuator>
<joint name="yaw_joint">
<offset>-1.826</offset>
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
</transmission>
将读取的 position 值取反后加到 offset 原本的值上面,作为新的值填入 offset 项
修改要后关闭所有控制器,重新进行一次准备部分的流程,再次进行打弹测试。所有涉及修改urdf的操作也是同理