请注意!本文的内容尚未经过验证。若你参照文章完成了调试,或是发现了文章存在的问题,请修正并编辑本提醒。
¶ 1. 准备
- 依照连车流程中的内容做到手跑控制器。
- 启动 plotjuggler 拉曲线。具体位置可参:
/rm_ecat_hw/gimbal_imu/angular_velocity
分屏分别拉出x,y,z - 把车静止放在一个稳定平整的位置。
¶ 2. 调整流程
要调整的位置:
rm_ws/src/rm_config/config/rm_ecat_hw/device_configurations/<兵种名>_gimbal.yaml
下图中的 bias 项
can_imus:
- can_bus: 0
name: "base_imu"
bias: [ 0.001689505, -0.001532915, 0.003052515 ]
- can_bus: 1
name: "gimbal_imu"
bias: [ -0.0, 0.0, 0.0 ]
只有轮腿有底盘imu,其余兵种只有云台 imu
-
按下图设置plotjuggloer 的 buffer
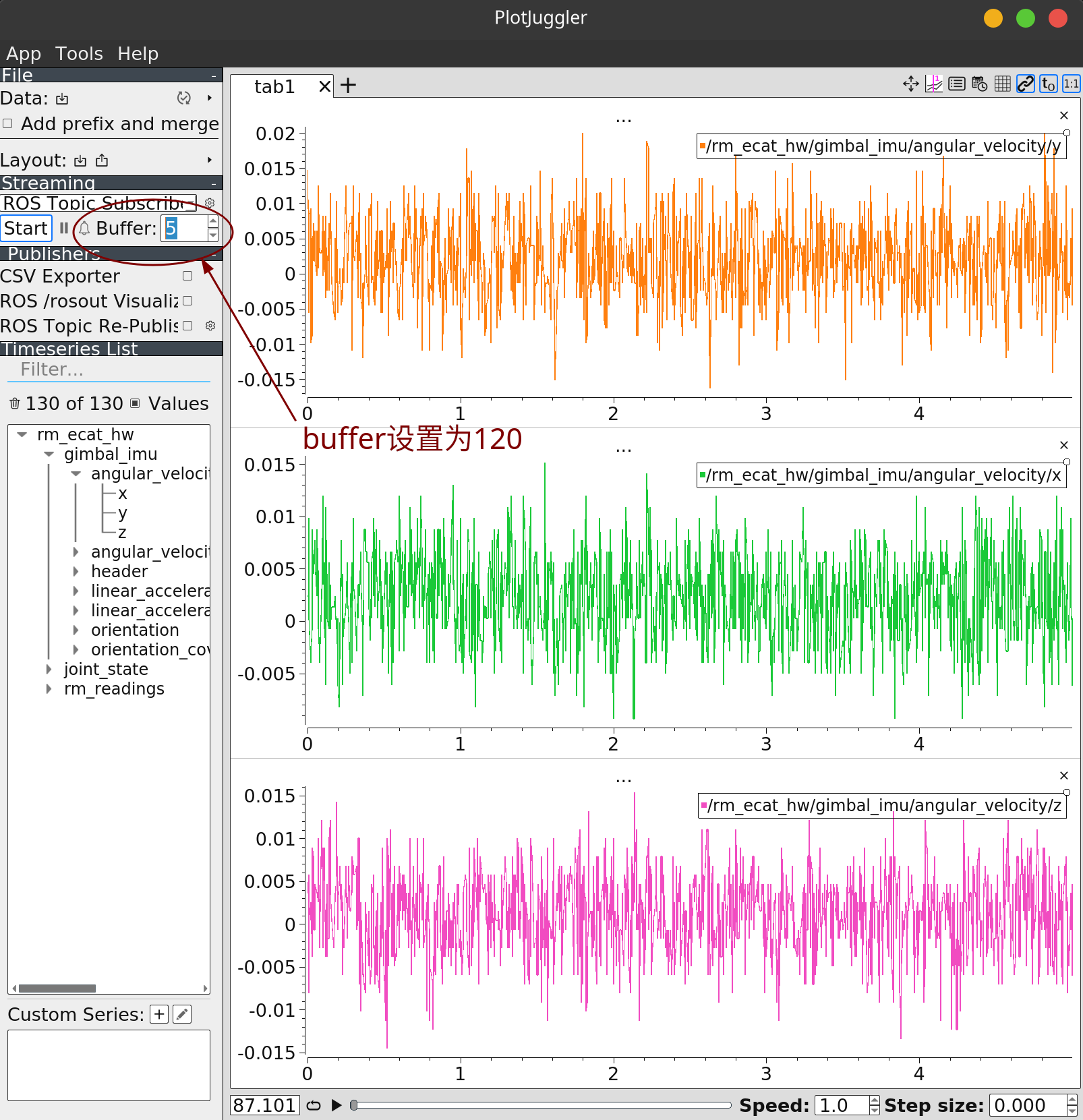
-
为x y z分别应用moveing averager filter
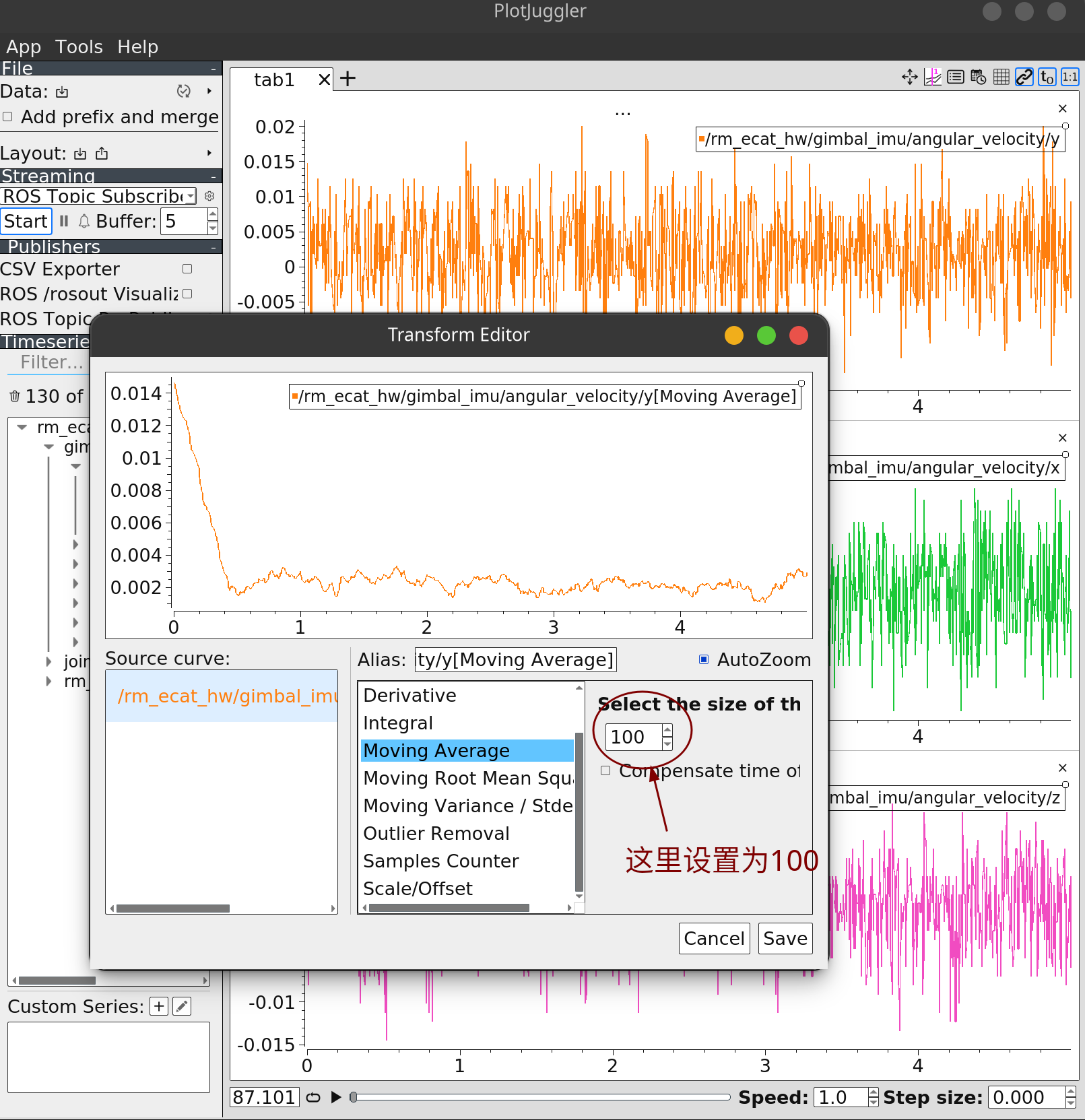
-
静置,等待 buffer 跑满
-
按住shift,分别读取x y z曲线的最大值和最小值,分别求平均,得到三个补偿值
-
bias: [ -0.0, 0.0, 0.0 ]分别对应x,y,z。将bias中x,y,z分别减去补偿值即可